Autonomous Mobility Briefing # 10
Autonomous mobility is entering a harder phase. Waymo’s recall, China’s robotaxi outage and Europe’s Level 4 bus projects show that the next test is not only technology — it is real-world operation.


Autonomous Mobility Under Pressure: Waymo, China and the Level 4 Bus
Robotaxis are moving from growth story to operating test — while China tightens oversight and Europe tries to turn Level 4 buses into real public transport.
Autonomous mobility is no longer just a technology story.
The pressure is shifting to real-world operation, regulation, public trust and public transport deployment.
The key question is simple: who can turn autonomous driving into a reliable operating model?
This Week’s Video
Autonom unter Druck: Waymo, China und der Level-4-Bus
In this week’s video, I look at three pressure points shaping autonomous mobility right now:
Waymo and the operating risks of real robotaxi scale.
China and the regulatory response to fast autonomous vehicle deployment.
Europe and the question of whether Level 4 buses can move from pilots into reliable public transport.
The point is not only whether autonomous vehicles can drive.
The real question is who can operate them safely, legally and at scale.
Global
Waymo: when robotaxi scale meets real-world edge cases
Waymo: when robotaxi scale meets real-world edge cases
Waymo is recalling 3,791 vehicles equipped with fifth- and sixth-generation Automated Driving Systems.
According to the NHTSA recall documents, the software may allow a vehicle to slow down and then continue into standing water on higher-speed roads. The recall followed an incident in San Antonio, where an unoccupied Waymo vehicle encountered a flooded road section that was not traversable and still proceeded at reduced speed.
That matters because Waymo is no longer only proving that robotaxis can drive. It is operating real services at scale.
And once robotaxis scale in real cities, the hard problems become operational: flooded roads, weather, temporary restrictions, mapping, remote support, service-area limits and the ability to decide when not to drive.
This is where autonomous mobility becomes more serious.
A robotaxi is not just an autonomous vehicle. It is part of an operating system. That system has to know when to move, when to stop and when the safest decision is to avoid a situation entirely.
The Waymo recall does not mean autonomous driving has failed.
It means the technology is far enough into real operations that edge cases are now part of the scaling test.
Source:
NHTSA Recall 26E026
https://static.nhtsa.gov/odi/rcl/2026/RCLRPT-26E026-6527.pdf

China
China shows the other side of scale: speed creates regulatory pressure
China remains one of the most important markets for autonomous mobility because deployment has moved faster and more aggressively than in Europe.
But the recent Baidu Apollo Go outage in Wuhan shows the other side of that speed.
More than 100 Baidu-operated robotaxis reportedly stopped in traffic in Wuhan, leaving passengers stranded and disrupting road traffic. The incident raised exactly the kind of question that matters once autonomous fleets become part of real transport systems:
What happens when scale breaks at the same time?
The issue is not only technical. It is operational and regulatory.
If autonomous vehicles stop individually, that is a vehicle problem. If many vehicles stop at the same time, it becomes a fleet problem. And if that fleet is visible in public traffic, it becomes a trust and regulation problem.
That is why China is so important for the global autonomous mobility debate.
It shows how fast scaling can create market momentum — but also how quickly operational problems can force regulators to step in.
Source:
Associated Press:

Europe / Germany
The Level 4 bus is where Europe’s autonomous mobility model becomes visible
In Europe, the autonomous mobility debate is not only about robotaxis.
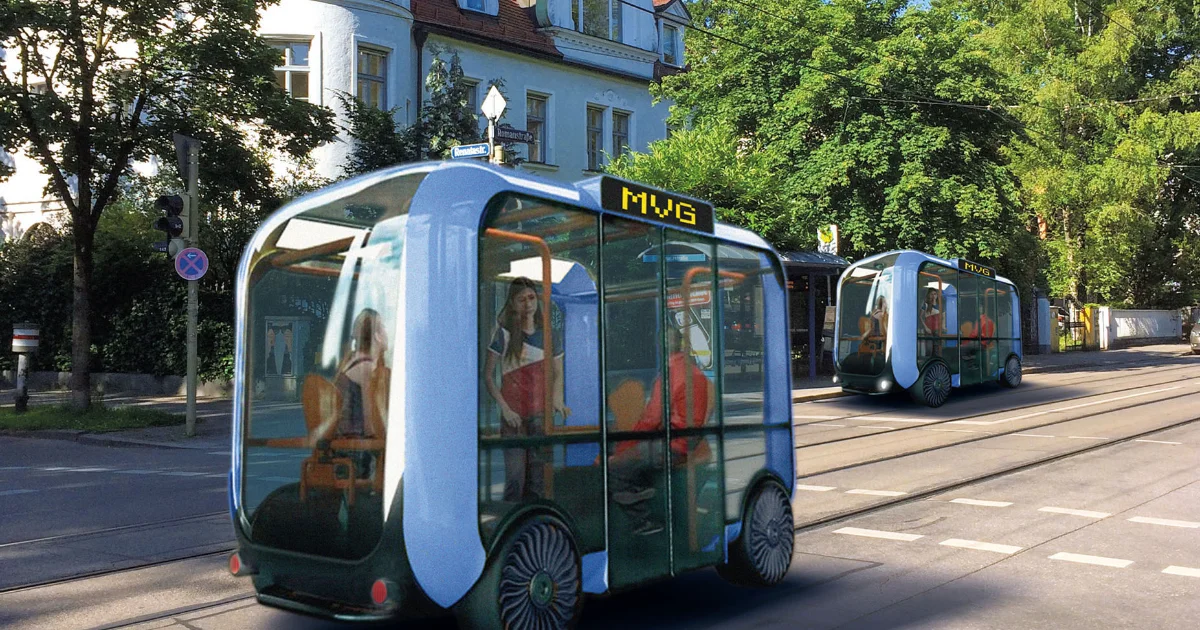
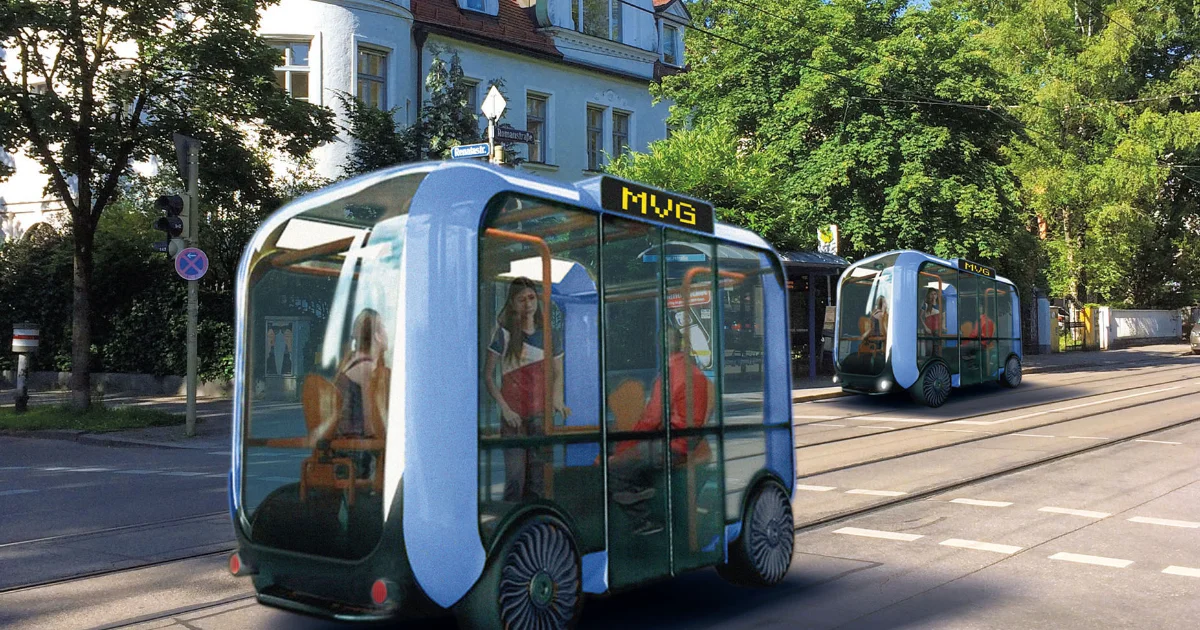
It is also about whether Level 4 buses can become part of real public transport.
Munich’s MINGA project is a good example. MAN has automated an electric city bus together with ADASTEC as technology partner. According to MAN, the Munich Transport Company plans to test the automated bus in city traffic from autumn 2026.
This matters because public transport follows a different logic than private robotaxi platforms.
A bus is not just a vehicle. It is part of a route, a timetable, a control center, a safety concept, a public operator and a political responsibility structure.
That makes Europe’s path look slower than the robotaxi race in the United States or China.
But it also addresses a different question:
Can autonomous mobility become part of the public transport system, not only a private ride-hailing service?
If Europe wants to stay relevant in autonomous mobility, the Level 4 bus may become one of the most important fields to watch.
Source:
MAN Truck & Bus:

Public Transport
Why autonomous buses are harder than they look
The Level 4 bus is not just a smaller version of the robotaxi story.
In public transport, the operating model is more complex. There are passengers, stops, schedules, accessibility requirements, emergency procedures, control centers and local operators.
That means the key question is not only whether the bus can drive autonomously.
The key question is whether the whole system can work reliably: vehicle, route, operator, remote supervision, approval process, safety case and passenger experience.
This is why public transport matters for autonomous mobility.
It forces the technology into a more regulated and more accountable environment.
And that may be exactly where Europe can build a different role: not by copying the robotaxi platform race, but by turning autonomous driving into a public transport operating model.
Bottom Line
This week shows that autonomous mobility is entering a harder phase.
Waymo proves that driverless robotaxis can scale — and that scale exposes real operational edge cases.
China shows that rapid deployment can quickly become a regulatory issue when fleet operations fail.
Europe shows that Level 4 buses may move more slowly, but they could become a key path into real public transport.
The central question is no longer only:
Who has the best autonomous driving technology?
The better question is:
Who can turn autonomous mobility into a safe, regulated and trusted operating system?
DEUTSCHE VERSION
Aktuelles Video der Woche
Autonom unter Druck: Waymo, China und der Level-4-Bus
Im aktuellen Video geht es um drei Belastungsfelder, die autonome Mobilität gerade prägen:
Waymo und die operativen Risiken realer Robotaxi-Skalierung.
China und die regulatorische Reaktion auf schnelle autonome Fahrzeugflotten.
Europa und die Frage, ob Level-4-Busse aus Pilotprojekten in zuverlässigen ÖPNV-Betrieb kommen.
Der Punkt ist nicht mehr nur, ob autonome Fahrzeuge fahren können.
Die eigentliche Frage ist, wer sie sicher, rechtlich sauber und skalierbar betreiben kann.
Global
Waymo: Wenn Robotaxi-Skalierung auf reale Grenzfälle trifft
Waymo ruft 3.791 Fahrzeuge mit automatisierten Fahrsystemen der fünften und sechsten Generation zurück.
Laut NHTSA kann die Software dazu führen, dass ein Fahrzeug auf Straßen mit höherer Geschwindigkeit zwar abbremst, dann aber trotzdem in stehendes Wasser weiterfährt. Auslöser war ein Vorfall in San Antonio. Dort traf ein unbesetztes Waymo-Fahrzeug auf einen überfluteten, nicht passierbaren Straßenabschnitt und fuhr nach der Erkennung mit reduzierter Geschwindigkeit weiter.
Das ist relevant, weil Waymo nicht mehr nur beweist, dass Robotaxis fahren können. Waymo betreibt reale Dienste im Markt.
Und sobald Robotaxis in echten Städten skalieren, werden die schwierigen Fälle operativ: überflutete Straßen, Wetter, temporäre Einschränkungen, Karten, Remote Support, Betriebsgebiete und die Fähigkeit zu entscheiden, wann ein Fahrzeug nicht weiterfahren darf.
Genau an diesem Punkt wird autonome Mobilität ernst.
Ein Robotaxi ist nicht nur ein autonomes Fahrzeug. Es ist Teil eines Betriebssystems. Dieses System muss wissen, wann es fährt, wann es stoppt und wann die sicherste Entscheidung ist, eine Situation vollständig zu vermeiden.
Der Waymo-Rückruf bedeutet nicht, dass autonomes Fahren gescheitert ist.
Er zeigt eher, dass die Technologie so weit im realen Betrieb angekommen ist, dass Grenzfälle des Alltags jetzt Teil des Skalierungstests werden.
Quelle:
NHTSA Recall 26E026
https://static.nhtsa.gov/odi/rcl/2026/RCLRPT-26E026-6527.pdf

China
China zeigt die andere Seite der Skalierung: Geschwindigkeit erzeugt Regulierungsdruck
China bleibt einer der wichtigsten Märkte für autonome Mobilität, weil die Umsetzung dort schneller und aggressiver läuft als in Europa.
Aber der jüngste Baidu-Apollo-Go-Ausfall in Wuhan zeigt die andere Seite dieser Geschwindigkeit.
Mehr als 100 von Baidu betriebene Robotaxis sollen in Wuhan im Verkehr stehengeblieben sein. Fahrgäste wurden festgesetzt, der Verkehr wurde gestört, und der Vorfall hat genau die Frage aufgeworfen, die bei autonomen Flotten entscheidend wird:
Was passiert, wenn Skalierung gleichzeitig ausfällt?
Das Problem ist nicht nur technisch. Es ist operativ und regulatorisch.
Wenn ein autonomes Fahrzeug stehenbleibt, ist das ein Fahrzeugproblem. Wenn viele Fahrzeuge gleichzeitig stehenbleiben, wird daraus ein Flottenproblem. Und wenn diese Flotte sichtbar im öffentlichen Verkehr unterwegs ist, wird daraus ein Vertrauens- und Regulierungsthema.
Genau deshalb ist China für die globale Debatte so wichtig.
China zeigt, wie schnelle Skalierung Marktdynamik erzeugen kann — aber auch, wie schnell operative Probleme die Aufsicht auf den Plan rufen.
Quelle:
Associated Press:

Europe / Germany
Der Level-4-Bus zeigt, wo Europas autonomes Mobilitätsmodell sichtbar wird
In Europa geht es bei autonomer Mobilität nicht nur um Robotaxis.
Es geht auch darum, ob Level-4-Busse Teil des realen öffentlichen Verkehrs werden können.
Das Münchner MINGA-Projekt ist dafür ein gutes Beispiel. MAN hat gemeinsam mit ADASTEC als Technologiepartner einen elektrischen Stadtbus automatisiert. Laut MAN plant die Münchner Verkehrsgesellschaft, den automatisierten Bus ab Herbst 2026 im Münchner Stadtverkehr zu testen.
Das ist relevant, weil öffentlicher Verkehr einer anderen Logik folgt als private Robotaxi-Plattformen.
Ein Bus ist nicht nur ein Fahrzeug. Er ist Teil einer Linie, eines Fahrplans, einer Leitstelle, eines Sicherheitskonzepts, eines öffentlichen Betreibers und einer politischen Verantwortungsstruktur.
Deshalb wirkt Europas Weg langsamer als das Robotaxi-Rennen in den USA oder China.
Aber er beantwortet auch eine andere Frage:
Kann autonome Mobilität Teil des öffentlichen Verkehrssystems werden und nicht nur ein privater Ride-Hailing-Dienst?
Wenn Europa bei autonomer Mobilität relevant bleiben will, könnte der Level-4-Bus eines der wichtigsten Felder werden.
Quelle:
MAN Truck & Bus:
Public Transport / ÖPNV
Warum autonome Busse schwieriger sind, als sie aussehen
Der Level-4-Bus ist nicht einfach eine kleinere Version der Robotaxi-Story.
Im öffentlichen Verkehr ist das Betriebsmodell komplexer. Es gibt Fahrgäste, Haltestellen, Fahrpläne, Barrierefreiheit, Notfallprozesse, Leitstellen und lokale Betreiber.
Die zentrale Frage ist deshalb nicht nur, ob der Bus autonom fahren kann.
Die zentrale Frage ist, ob das ganze System zuverlässig funktioniert: Fahrzeug, Strecke, Betreiber, Remote Supervision, Zulassung, Sicherheitsnachweis und Fahrgasterlebnis.
Genau deshalb ist der ÖPNV für autonome Mobilität so wichtig.
Er zwingt die Technologie in ein regulierteres und stärker verantwortetes Umfeld.
Und genau dort könnte Europa eine eigene Rolle aufbauen: nicht als Kopie des Robotaxi-Plattformrennens, sondern als Modell für autonomen Betrieb im öffentlichen Verkehr.
Bottom Line
Diese Woche zeigt, dass autonome Mobilität in eine härtere Phase kommt.
Waymo beweist, dass fahrerlose Robotaxis skalieren können — und dass Skalierung reale operative Grenzfälle sichtbar macht.
China zeigt, dass schnelle Umsetzung sehr schnell zu Regulierungsdruck führen kann, wenn Flottenbetrieb ausfällt.
Europa zeigt, dass Level-4-Busse langsamer wirken, aber ein zentraler Weg in den realen öffentlichen Verkehr sein könnten.
Die zentrale Frage lautet nicht mehr nur:
Wer hat die beste autonome Fahrtechnologie?
Die bessere Frage lautet:
Wer kann aus autonomer Mobilität ein sicheres, reguliertes und vertrauenswürdiges Betriebssystem machen?



